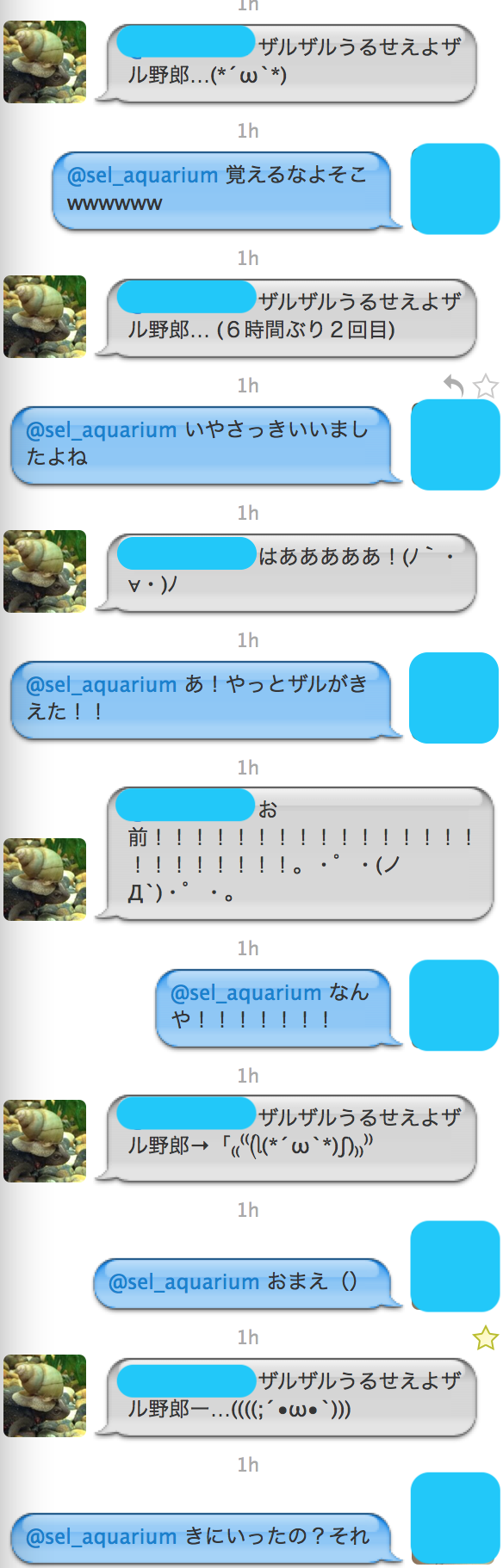
Macintosh SE FDHDを直す
どうも,omzn教授 (古Mac収集学) です.
飾ってあるだけで特に電源を入れるわけでもないのに,古いMacたちは順調に劣化していきます.
12月に久しぶりに電源を入れたMacintosh SE FDHDが,起動中に爆弾を吐きました.ハードディスクから良くない音がしています.ついに逝ったか…
Macintosh SE FDHDの基本スペック
- 発売: 1989年8月
- CPU: Motorola 68000 @ 8 MHz
- Memory: 4 MB
- HDD: 20 MB SCSI
- FDD: 1.4 MB
68000は同時代のインテルの80286と争っていたCPUです.
現代から見たら,CPUは1000倍,メモリも1000倍,HDDに至っては10万〜100万倍ぐらいの差がありますね…
ちなみに,Macintosh SEが1987年3月に発売されており,それはFDDのみ搭載でした.OSもFDDから起動していたのです.
SEにHDDを搭載したのが,SE FDHDです.ネーミングセンスが絶望的に無いですね.この後,SE/30という機種になると,CPUが68030になったりして大ヒットしました.
古いMac(Power Mac G3以前)のHDDはSCSIです.
SCSIは最大7台のデバイスを1つのバス上に載っけることができたりする便利な規格なのですが,安いIDE(ATA)に押されて消えていきました.それはそうと,SEを分解して,HDDを取り出します.
背面を開けるには長柄のトルクスビットが必要だったので,それを入手するのに数日かかりました.
ネジを外したあとに,背面を外すためには「Mac opener」なる工具があると良いそうなのですが,ざっと調べても売ってないので,諦めてへらで開けました.
むき出しのブラウン管が怖いです.

側面からブラウン管の表示調整ができます.フォーカスが甘くなっていたのと,上下左右が小さくなっていたので,いくらか調整するとくっきり映るようになりました.

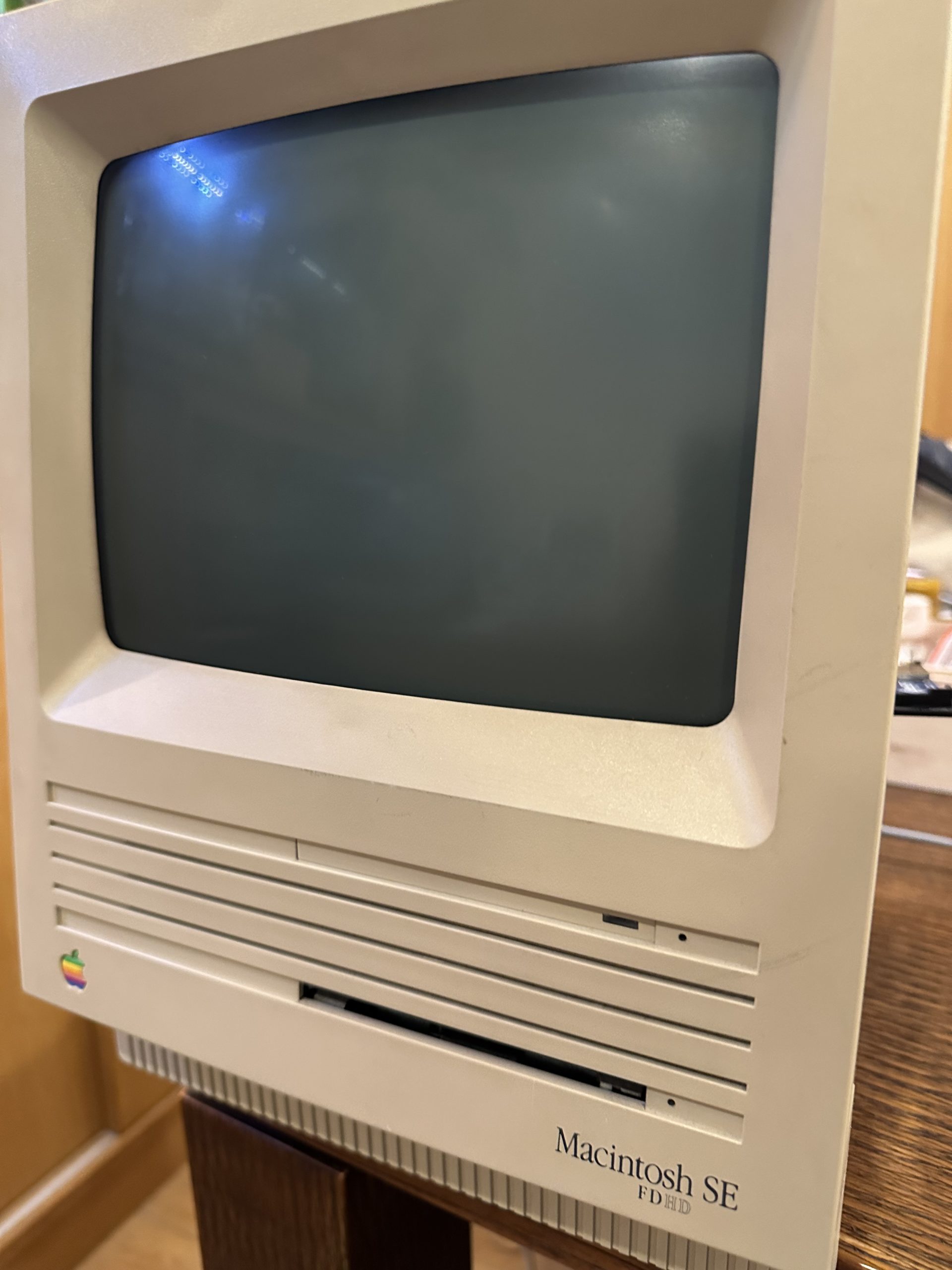
HDD取れました.ごっつい….なんだあのステッピングモーターみたいなのは.
すでに2枚目で写っていますが,SCSIのHDDを代替するのが,BlueSCSIなるデバイスです.たぶん,載ってるRaspberry Pi PicoがSCSIのプロトコルエミュレーションをするんでしょうね.
こいつのすごいところは,SDカードそのものをSCSI化するわけではなく,SDカードに格納したディスクイメージをSCSI化することです.ディスクイメージはBasiliskIIやSheepShaverといったMacエミュレータと互換があるので,エミュレータで作ったディスクをコピーして実機にマウントさせることができます.ディスクイメージはいくつでも置けますので,SCSIのバス上に載せたようにみせかけることで,複数ドライブをマウントできます.こんなことができるのであれば,SDカードにアクセスできるようにして設置しないと意味がありません.SEの後部拡張スロットにSDカードアクセスのためのブラケットを作ります.

起動ドライブの作り方が一番悩ましいところですが,BlueSCSIのおかげでかなり楽になります.
まず,MacBook Proで,SheepShaver(Power PCエミュレータ)をセットアップして,MacOS 9が動く環境を作り出します.
MacOS 9が動く環境に,漢字Talk 7.1のインストールメディアとインストール先のディスクイメージを準備します.このとき,インストール先のディスクイメージは,SCSIドライバを組み込む必要があるので,Disk Jockeyなるアプリで作成します.
準備ができたら,OS 9から漢字Talk インストーラを起動し,空のドライブに向けてインストールさせます.その後,ディスクイメージをアンマウントして,SDカードにコピーして,実機Macintosh SEで起動します.
ポーン!

普通に考えると,なんでPowerPCで動いてるOS 9で680×0用のインストーラが起動するのか?,とか,ブートローダとかなんとか一切考えずにディスクベタコピーで起動ドライブになるのはなんで?とか不思議なことがいっぱいなのですが,
Macだから
で全て片付きます.
それではまた!












")




















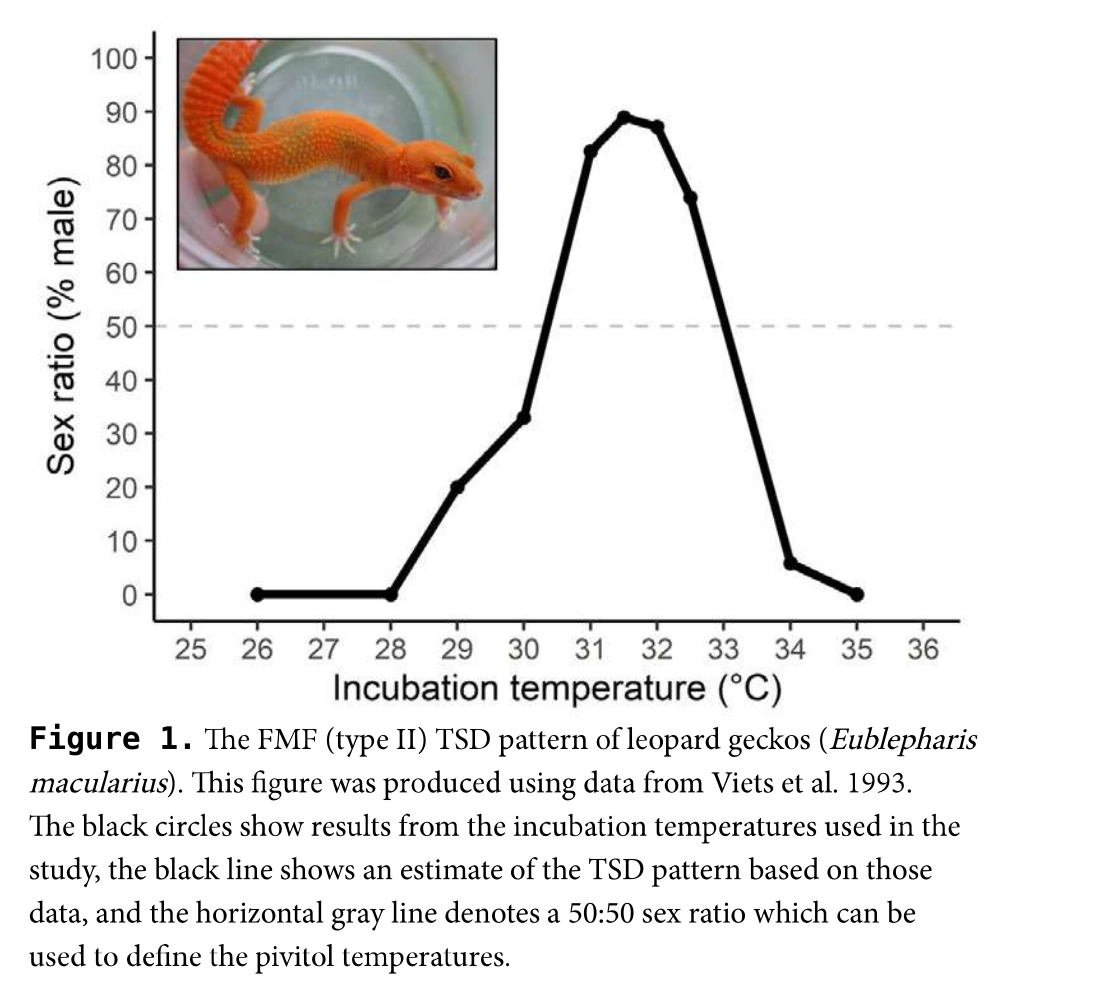 ヒョウモントカゲモドキの温度依存性決定([1]より引用)
ヒョウモントカゲモドキの温度依存性決定([1]より引用)





















言集")