(日本語) バグの名前を探す話
 バグの名前を探す話")
この記事は,あくあたん工房Advent Calendar 2020の12日目です.
こんにちは.omznです.
一応,「あくあたん」の始祖なのですが,工房とはほとんど何の関係もありませんね.僕もあくあたん工房を知らないし,あくあたん工房も僕を知らない.まあそれで良いのです.
今年は何をしていたかというと,昨年までいろいろあったので心を癒やすためにずっと池田の五月山で山登りをしていました.
山ではずっとバグを探して写真を撮っていました.
ソフトウェアのバグを探すのは心がささくれますが,昆虫のバグを探すのは癒やしになります.
虫を見つけると,同定を行います.名前を探すわけですね.よく知ってる虫ならすぐに分かりますが,なんせ昆虫はやまほど種類がありますし,池田〜箕面は種類が豊富なことでも有名です.その結果,見たこともない虫を発見して,なかなか名前が分からないのが出てくるわけです.
今年,同定できた中で難問だったやつを紹介します.

この子ですね.一見してカミキリムシだとは分かります.
さらにトラカミキリ系だなということまで分かります.
時期は8月,エノキの木で発見しました.
問題はそこからです.カミキリムシは種類が多いことで有名なのです.
ざくっとググると…こんなサイトとかこんなサイトとかがかかってきますが,この写真と同じっぽいのが見当たりません.
アカネキスジトラカミキリが似ているのですが,微妙に違います.
余談ですが,アカネトラカミキリ,キスジトラカミキリ,アカネキスジトラカミキリ,というのがいて,種名が組み合わせテストみたいなことになってます.
発生時期や食料となる木の種類なども見ながら,ああでもない,こうでもない,と考えます.
この後,Google画像検索とひたすらにらめっこしつつ,「アカネキスジトラカミキリでいいのでは」「いや,何かが違う…」「いや,やっぱり…」みたいな(無駄な)ことを延々と考え続けることになります.
そうこうしているうちに,こちらを最初から全部見ていくと,上から3番目にそれっぽいのがいました.
あ,これだ.
試しにヤノトラカミキリでググるといっぱい出てきます.
まさにこれ.ていうか,見た場所も同じ.なんなら,この樹皮に見覚えがある.
ということで,同定完了です.「ヤノトラカミキリ」でした.なお,私が夏中ずっと山を歩いて虫を探していましたが,ヤノトラカミキリが見つかったのは,ある1本のエノキの木だけでした.そこでは1週間ぐらい連続で10匹以上発見しましたが,他では一切見つからなかったのでした.
最初にトラカミキリと当たりをつけたのでだいぶ枝刈りできましたが,カミキリムシだなあ,ぐらいから入ると気が遠くなる作業ではあります.
もうひとつ.今度はチョウです.
山に登るとヒカゲチョウというタテハチョウの仲間によく出会います.こいつらも種類が多いのです.


上の2枚の写真,しばらくの間,同じ種だと思っていたのですが,実は違う種でした.
上は「ヤマキマダラヒカゲ」,下は「サトキマダラヒカゲ」です.どっちも普通にいる種ですが,違いが微妙.
斑紋が全体的にくっきりしてるとかも特徴なのですが,決め手はこれ.
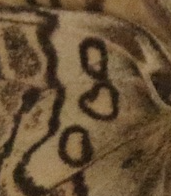
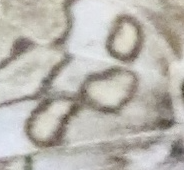
比較のために下の方は回転とフリップをしていますが,「羽の付け根の模様の一番下がくっついているか離れているか」が決め手なのでした.そんなん知らんがな….
最後に,難問ではないのですが,面白いチョウを紹介して終わりにします.
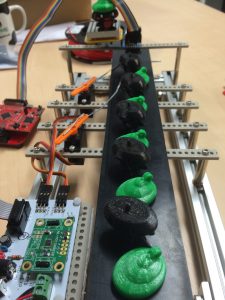
「クロマダラソテツシジミ」です.元々は東南アジアなどの南方のチョウなのですが,2007年に突然池田から宝塚にかけて見つかるようになりました.名前の通り,幼虫はソテツを食べて育つのですが,ソテツが南方から園芸・植木の盛んな池田・宝塚に持ってこられた結果,このあたりで見つかるようになったと思われています.なお,その後,関西にはすごい勢いで広がっていき,今では割とどこでも見ることができます.小さいシジミチョウですが,羽の模様は美しく,じっくり眺めていると飽きません.
まあ,そんなこんなで虫の写真をひたすら撮った1年でした.来年は何に会えるかな.
ソフトウェアのバグの研究が蔑ろになっているのはまた別の話…